|
Z=HpЪБЃЌІШ=0ЃЌІШЁф=0
ЁЁЁЁL=L0ЃЈЖЈжЕЃЉ
ЁЁЁЁНЋвдЩЯЙиЯЕЗжБ№ДњШыЃЈE10ЃЉ~ЃЈE143ЃЉЃЌПЩЧѓЕУИїЛ§ЗжГЃЪ§ЮЊЃК
ЁЁЁЁC4=0
ЁЁЁЁ

ЃЛ
ЁЁЁЁ
ЃЛ
ЁЁЁЁC1=ЈDC2HЈDC3shЃЈKHpЃЉЈDC4chЃЈKHpЃЉЃЛ
ЁЁЁЁНЋгаЙиВЮЪ§ДњШыЃЈE12ЃЉЪНОећРэЕУЃК
ЁЁЁЁ

ЃЛ
ЁЁЁЁ

ЃЛ
ЁЁЁЁНЋвдЩЯСНЪНДњШыЪНЃЈE8ЃЉКЭЃЈE9ЃЉЃЌМДПЩЧѓЕУХЄзЊе§гІСІКЭХЄзЊМєгІСІЁЃ
ЁЁЁЁ4ЃЎ УХМмЪНБъжОЕФСЂжљгыКсСКЩшМЦгыбщЫу
ЁЁЁЁУХМмЪНБъжОЕФНсЙЙаЭЪННЯЖрЃЌвдЭМE7ЫљЪОЫЋКсСКЫЋСЂжљаЮЪНЕФУХМмЮЊР§ЃЌдкКудизїгУЯТЃЌУХМмЕФШЮвЛНиУцЩЯНЋжЛВњЩњШЦУХМмЗЈЯпЗНЯђЕФЭфОиКЭУХМмЦНУцФкЕФжсСІЁЂМєСІЃЛдкЗчдизїгУЯТЃЌУХМмЕФШЮвЛНиУцЩЯжЛгаШ§жжФкСІЃКШЦЮЛгкУХМмЦНУцФкЕФжїжсЕФЭфОиЁЂДЙжБгкУХМмЦНУцЕФМєСІКЭХЄОиЁЃИљОнНсЙЙЕФЖдГЦадЃЌЗжБ№бЁдёЭМE7ЃЈaЃЉЁЂЭМE7ЃЈbЃЉЮЊЛљБОНсЙЙЃЌВЩгУСІЗЈНјааМЦЫуЁЃ
ЁЁЁЁ

ЁЁЁЁЭМE7
ЁЁЁЁЮДжЊСІЧѓГіКѓЃЌМДПЩАДЕўМгЗЈЧѓЕУИїКсСККЭСЂжљЕФЭфОиЁЂХЄОиКЭМєСІЕШФкСІЃЌШЛКѓдйИљОнЧАЪіЗНЗЈНјааКсСККЭСЂжљЕФЩшМЦгыбщЫуЁЃ
ЁЁЁЁE6ЃЎ3 СЂжљЃЈКсСКЃЉЕФБфаЮбщЫу
ЁЁЁЁИљОнОбщЃЌАДееЧПЖШЬѕМўЩшМЦЕФБъжОСЂжљЛђКсСКНиУцЭљЭљЙ§гкЕЅБЁЃЌДЫЪБЃЌИеЖШЬѕМўПЩФмЦ№ПижЦзїгУЁЃвђДЫЃЌЖдгкИїРрНЛЭЈБъжОНсЙЙЃЌЙЙМўЕФБфаЮбщЫуЪЧБиВЛПЩЩйЕФЃЌетвВЪЧЦфгаБ№гкЦфЫћЭСНЈНсЙЙЮяЕФвЛИіЯджјЬиЕуЁЃЖдгкаќБлЪНКЭУХМмЪНЕФБъжОЃЌгЩгкдкзджизїгУЯТЃЌКсСКЛсздШЛЯТДЙЃЌвђДЫБфаЮЕФбщЫувВПЩЮЊКсСКдЄЙАЖШЕФЩшМЦЬсЙЉвРОнЁЃ
ЁЁЁЁдкЙЄГЬЪЕМљжаЃЌСЂжљЛђКсСКЕФФгЖШШнаэжЕЭЈГЃгУШнаэЕФФгЖШгыЦфПчГЄ[v/Hp]зїЮЊБъзМЁЃЭСНЈЙЄГЬЗНУцЃЌ[v/Hp]ЕФжЕГЃЯожЦдк1/100~1/1000ЗЖЮЇФкЁЃИљОнБъжОНсЙЙЕФОпЬхЬиЕуЁЃ[v/Hp]ЕФжЕдк1/100~1/150ЗЖЮЇФкбЁдёЃЌМШФмТњзуЛљБОЪЙгУвЊЧѓЃЌгжВЛжТгкЙ§ЗжЬсИпдьМлЁЃ
ЁЁЁЁСЂжљЛђКсСКЕФБфаЮбщЫуЃЌПЩЗжБ№ЧѓЕУУПЯюКЩдиЕЅЖРзїгУЯТСКЕФФгЖШvКЭзЊНЧІШЃЌШЛКѓАДееЕўМгдРэНјааЕўМгЁЃ
ЁЁЁЁE6ЃЎ4 СЂжљгыКсСКЕФСЌНгТнЫЈЁЂСЂжљгыЛљДЁЕФЕиНХТнЫЈЕФЩшМЦгыЧПЖШбщЫу
ЁЁЁЁзїЮЊСЌНгМўЕФЦеЭЈСЌНгТнЫЈКЭЕиНХТнЫЈОљНЋГаЪмРСІЕФзїгУЃЌгІЪЙЦфЫљГаЪмЕФзюДѓРСІТњзуГадиСІЩшМЦжЕЕФвЊЧѓЃК
ЁЁЁЁ1ЃЎ жљЪНЁЂЫЋаќБлЪНБъжОСЂжљгыЛљДЁЕФСЌНгЃК
ЁЁЁЁСЂжљИљВПГаЪмжсаФСІЃЈзджиЃЉКЭСІОиЃЈгЩЗчдив§Ц№ЕФЭфОиЃЉЕФзїгУЃЌгІЪЙ
ЁЁЁЁ

ЁЁЁЁЪНжаЃКNmaxЁЊЁЊЕЅИіЕиНХТнЫЈЫљГаЪмЕФзюДѓРСІжЕЃЛ
ЁЁЁЁ

ЁЊЁЊЕЅИіЕиНХТнЫЈЕФГадиСІЩшМЦжЕЁЃ
ЁЁЁЁ2ЃЎ аќБлЪНБъжОСЂжљгыКсСКЕФСЌНгЃК
ЁЁЁЁКсСКИљВПГаЪмгЩЫЎЦНЗНЯђЕФЗчдив§Ц№ЕФМєСІКЭЭфОиЁЂгЩДЙжБЗНЯђЕФжиСІв§Ц№ЕФМєСІКЭЭфОиЃЌВЛЭЌЗНЯђЕФМєСІКЭЭфОиОзщКЯКѓЃЌгІТњзуЃК
ЁЁЁЁ

ЁЁЁЁ

ЁЁЁЁЪНжаЃКNvЁЊЁЊУПИіЦеЭЈТнЫЈЫљГаЪмЕФМєСІЦНОљжЕЃЛ
ЁЁЁЁ

ЁЊЁЊУПИіЦеЭЈТнЫЈАДЪмМєСІМЦЫуЕФГадиСІЩшМЦжЕЃЛ
ЁЁЁЁ
ЁЊЁЊУПИіЦеЭЈТнЫЈАДГабЙМЦЫуЕФГадиСІЩшМЦжЕЁЃ
ЁЁЁЁ3ЃЎ ЕЅаќБлЪНБъжОСЂжљгыЛљДЁЁЂУХМмЪНБъжОСЂжљгыКсСККЭСЂжљгыЛљДЁЕФСЌНгЃК
ЁЁЁЁЕЅаќБлЪНБъжОСЂжљгыЛљДЁСЌНгДІЁЂУХМмЪНБъжОСЂжљгыКсСККЭСЂжљгыЛљДЁСЌНгДІНЋГаЪмгЩЫЎЦНЗНЯђЕФЗчдив§Ц№ЕФМєСІКЭЭфОивдМАХЄОиЁЂгЩДЙжБЗНЯђЕФжиСІв§Ц№ЕФжсаФСІКЭЭфОиЃЌгІТњзуЕФЧПЖШЬѕМўЭЌЃЈE15ЃЉЁЂЃЈE16ЃЉЃЌЕЋNvгІМЦМАХЄОиЕФгАЯьЁЃ
ЁЁЁЁE6ЃЎ5 ЛљДЁЕФЩшМЦгыбщЫу
ЁЁЁЁ1ЃЎ ЛљДЁЕФЩшжУЮЛжУЃК
ЁЁЁЁНЛЭЈБъжОЕФЛљДЁЃЌвЛАуЩшжУдкбЙЪЕЖШСМКУЕФЭСТЗЕЬЛђШ§НЧЕиДјЮЛжУДІЃЌЕБЫљДІЮЛжУВЛвЫИќИФЪБЃЌвВПЩвдЩшжУдкЭкЗНТЗЖЮЕФЫщТфЬЈЛђДѓаЭЧХСКЩЯЁЃ
ЁЁЁЁ2ЃЎ ЛљДЁЕФЩшМЦЃК
ЁЁЁЁНЛЭЈБъжОЕФЛљДЁЃЌТёЩювЛАудк3mвдЯТЃЌЪєгкЧГЛљДЁЃЌПЩвдЩшМЦГЩВЛБиХфжУЪмСІИжНюЕФИеадЛљДЁаЭЪНЃЛЮЛгкЧХСКЩЯЕФБъжОЃЌгІЭЈЙ§МЦЫуХфжУБивЊЕФЪмСІИжНюЃЛЕБИеадЛљДЁЙ§гкХгДѓЛђБъжОЮЛжУДІЭСжЪВЛСМЪБЃЌПЩвдПМТЧЩшМЦзЎЛљДЁЁЃ
ЁЁЁЁ3ЃЎ ЛљДЁЕФбщЫуЃК
ЁЁЁЁЃЈ1ЃЉ ЛљЕзгІСІМЦЫу
ЁЁЁЁШЗЖЈЛљДЁЕФТёжУЩюЖШКЭЙЙдьГпДчКѓЃЌгІЯШИљОнзюВЛРћЧщПіЯТЕФКЩдизщКЯЃЌМЦЫуЛљЕзЕФгІСІЃЌгІОЁСПБмУтЛљЕзГіЯжИКгІСІЃЈЛљЕзИКгІСІУцЛ§ВЛДѓгкШЋВПУцЛ§ЕФ1/4ЃЉЃЌЗёдђгІПМТЧЛљЕзгІСІЕФжиЗжВМЁЃЛљЕзЗЂЩњЕФгІСІгІВЛГЌЙ§ЕиЛљГжСІВуЕФЧПЖШМДЕиЛљШнаэГадиСІЁЃ
ЁЁЁЁЃЈ2ЃЉ ЛљЕзКЯСІЦЋаФОрбщЫу
ЁЁЁЁЛљЕзКЯСІЦЋаФОргІВЛГЌЙ§ЛљЕзЕФКЫаФАыОЖЃЌЪЙЛљЕзгІСІОЁПЩФмЗжВМБШНЯОљдШЃЌвдУтЛљЕзСНВргІСІЯрВюЙ§ДѓЃЌЛљДЁВњЩњНЯДѓЕФВЛОљдШГСНЕЁЃ
ЁЁЁЁЃЈ3ЃЉ ЛљДЁЧуИВЮШЖЈадбщЫу
ЁЁЁЁгІЪЙПЙЧуИВЮШЖЈЯЕЪ§Дѓгк1.1~1.3ЁЃ
ЁЁЁЁЃЈ4ЃЉ ЛљДЁЛЌЖЏЮШЖЈадбщЫу
ЁЁЁЁгІЪЙПЙЛЌЖЏЮШЖЈЯЕЪ§Дѓгк1.2~1.3ЁЃ
ЁЁЁЁИНТМF
ЁЁЁЁЃЈЬсЪОЕФИНТМЃЉ
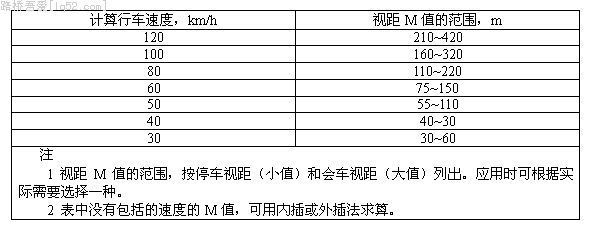
ЁЁЁЁИљОнзюаЁЪгОрMжЕЃЌдкЕРТЗЦНЧњЯпЩЯЃЌШЗЖЈжааФЪЕЯпЮЛжУЕФЗНЗЈ
ЁЁЁЁдкааЕРЪїЛђЙрФОТЬРщЗЧГЃУЏУмКЭгЩгкНЈжўЮяЛђЭСЪЏЗНзшЕВЖјПЩФмгАЯьЭЈИпОрРыЕФЦНЧњЯпЩЯЃЌашвЊЪЕЕиЕїВщЭЈЪгОрРыЕФЧщПіЃЌвдШЗЖЈЪЧЗёашвЊдкИУЦНЧњЯпЩЯЩшжУжааФЪЕЯпЃЌМАЪЕЯпЖЮЕФГЄЖШКЭОпЬхЮЛжУЁЃ
ЁЁЁЁжааФЪЕЯпЕФЩшжУЪЧгЩЪгОрРДШЗЖЈЕФЁЃЕБЪгОраЁгкзюаЁжЕMжЕЪБЃЌгІдкИУТЗЖЮЩшжУжааФЪЕЯпЁЃБэF1ЮЊНЈвщЕФMжЕЁЃ
ЁЁЁЁБэF1
ЁЁЁЁ
ЁЁЁЁАДзюаЁЛсГЕЪгОрMжЕЃЌдкЕРТЗЦНЧњЯпЩЯЃЌШЗЖЈжааФЪЕЯпЕФЗНЗЈЪЧЃКдкПЩФмашвЊЩшжУжааФЪЕЯпЕФЦНЧњЯпЩЯЃЌгІЯШЛЎГіСйЪБЕФжааФЯпЃЌВЂдкжааФЯпЩЯвдвЛЖЈЕФГЄЖШЃЈШч5mЃЉЃЌСПГіОрРыЁЃ
ЁЁЁЁХфБИВНЛАЛњЕФМзввСНШЫЃЌДгНгНќЭфЕРЕФжБЯпЖЮПЊЪМЃЌеОдкЕРТЗЕФжааФЯпЩЯЁЃввдкЧАЃЌМздкКѓЁЃЫћУЧжЎМфЕФОрРыЕШгкИУЕРТЗМЦЫуааГЕЫйЖШЯрЖдгІЕФЛсГЕЪгОрMЁЃИУОрРыПЩбиЕРТЗжааФЯпЃЌдЄЯШСПКУЕФМфИєЃЈШч5mЃЉРДСПЖШЁЃШЛКѓЃЌМзЭЈЙ§ВНЛАЛњУќСюввбизХжааФЯпЭЌВНЧАНјЁЃМзМЦЫуЧАНјОрРыЃЌУПЕНДявЛДІдЄЯШБъМЧЕФОрРыЃЌМзвЊБЈЪ§ЃЌвдБуввдкЧАУцЕїећЫћЕФЮЛжУЃЌЪЙЫћУЧБЃГжЯрЕШЕФОрРыЁЃдкввЕФЩэКѓгавЛЬѕЫЎЦНЕФЃЌРыЕиУцИп1.20mЕФАзЩЋБъДјЁЃМзаЏДјвЛИљИп1.20mЕФФОЙїЁЃМзвЊОГЃДгФОЙї1.20mЕФЪгЯпИпЖШЃЌЙлВьввЩэЩЯЕФАзЩЋБъДјЁЃЕБввЕФАзЩЋБъДје§КУДгМзЕФЪгЯпжаЯћЪЇЪБЃЌМзНаЁАЭЃЁБЁЃМзОЭдкДЫЮЛжУБъЁАA1ЁБЁЃШЛКѓЃЌЫћУЧМЬајвдЯрЕШЕФОрРыЧАНјЃЌжБЕНввЕФАзЩЋБъДјдйДЮдкМзЕФЪгЯпжаГіЯжЁЃДЫЪБЃЌМзгжНаЁАЭЃЁБЃЌВЂдкИУЮЛжУБъЁАA2ЁБЁЃЕуA1КЭA2ОЭЪЧМзввЧАНјЗНЯђжааФЪЕЯпЕФЦ№ЕуКЭжеЕуЁЃШЛКѓЃЌМзввСНШЫЕїЛЛжАФмЃЌДгЯрЗДЗНЯђжиИДЩЯЪіВНжшЁЃЖЈГіB1КЭB2ЕФЮЛжУЃЌЕуB1КЭB2ОЭЪЧЯрЗДЗНЯђжааФЪЕЯпЕФЦ№ЕуКЭжеЕуЁЃ
ЁЁЁЁШчЙћВЩгУЭЃГЕЪгОрЃЌдђМзввСНШЫжЎМфЕФОрРыЕШгкИУТЗМЦЫуааГЕЫйЖШЕФЭЃГЕЪгОрMЁЃМзЕФЪгОрИпЖШЮЊ1.20mЃЌввДњБэТЗУцеЯзшЮяЃЌАзЩЋБъДјЕФИпЖШгІПижЦдкРыЕи0.10mДІЃЌМДПЩАДЩЯЪіЗНЗЈШЗЖЈЧњЯпЩЯЕФжааФЪЕЯпЕФЮЛжУЁЃ
ЁЁЁЁЪњЧњЯпЩЯШЗЖЈжааФЪЕМљЕФЗНЗЈЃЌИњЩЯУцНщЩмЕФдкЦНЧњЯпЩЯЫљВЩгУЕФЗНЗЈЯрЫЦЁЃ
ЁЁЁЁИНТМG
ЁЁЁЁЃЈБъзМЕФИНТМЃЉ
ЁЁЁЁТЗУцБъЯпгУЮФзжЪОР§
ЁЁЁЁG1 ТЗУцБъЯпгУККзж
ЁЁЁЁ

ЁЁЁЁG2 ТЗУцБъЯпгУАЂРВЎЪ§зж
ЁЁЁЁ

ЁЁЁЁИНТМH
ЁЁЁЁЃЈЬсЪОЕФИНТМЃЉ
ЁЁЁЁНЛЭЈБъжОжЦзїЭМЪОР§
ЁЁЁЁ
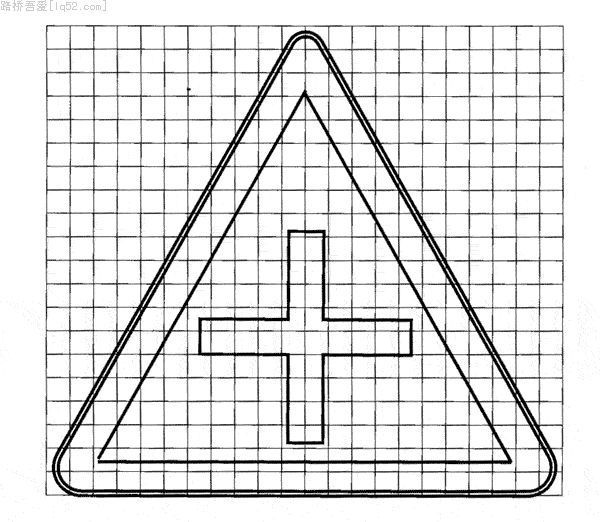
ЁЁЁЁЭМH1
ЁЁЁЁ
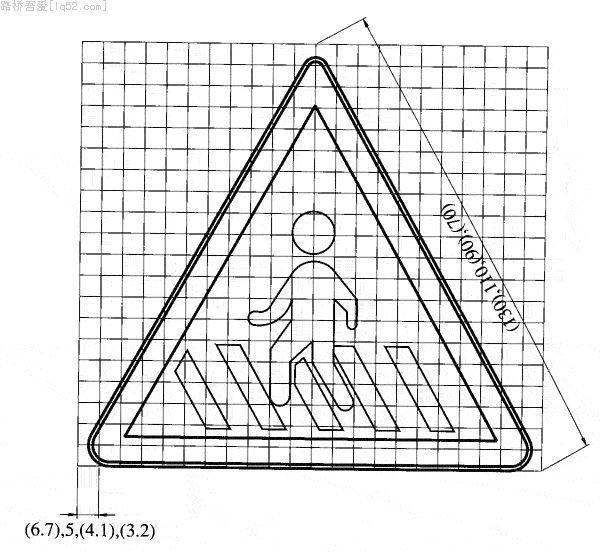
ЁЁЁЁЭМH2 ЕЅЮЛЃКcm
ЁЁЁЁ
ЁЁЁЁЭМH3
ЁЁЁЁ

ЁЁЁЁЭМH4 ЕЅЮЛЃКcm
ЁЁЁЁ
ЁЁЁЁЭМH5
ЁЁЁЁ

ЁЁЁЁЭМH6 ЕЅЮЛЃКcm
ЁЁЁЁ

ЁЁЁЁЭМH7ЃЈТЗ2ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH8ЃЈТЗ5ЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH9ЃЈТЗ7ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH10ЃЈТЗ9aЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH11ЃЈТЗ10aЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH12ЃЈТЗ10cЃЉ
ЁЁЁЁ

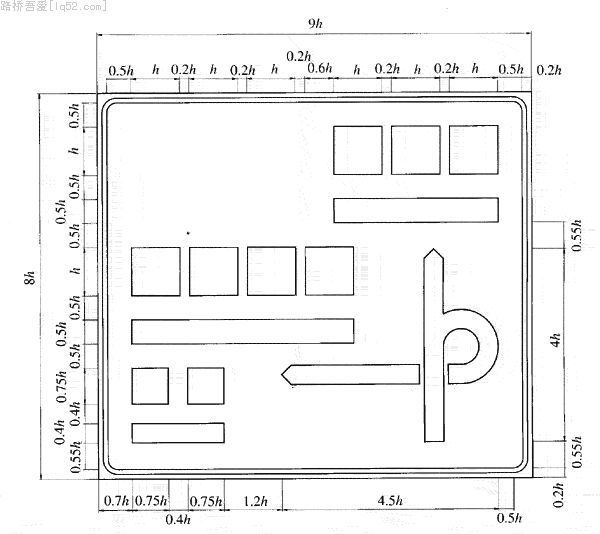
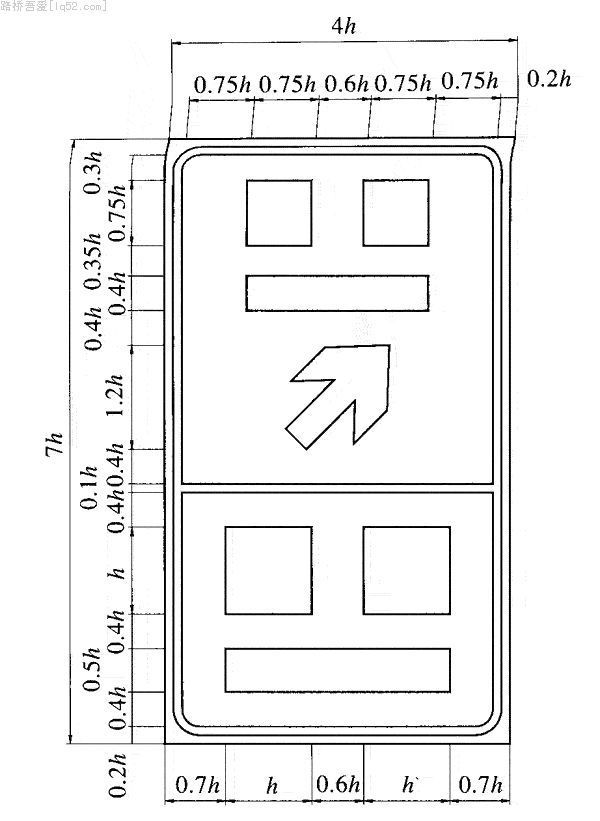
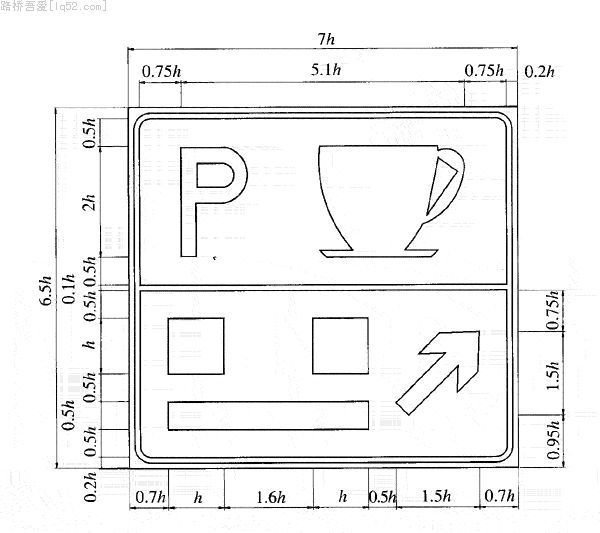
ЁЁЁЁЭМH13ЃЈТЗ12bЃЉ
ЁЁЁЁ
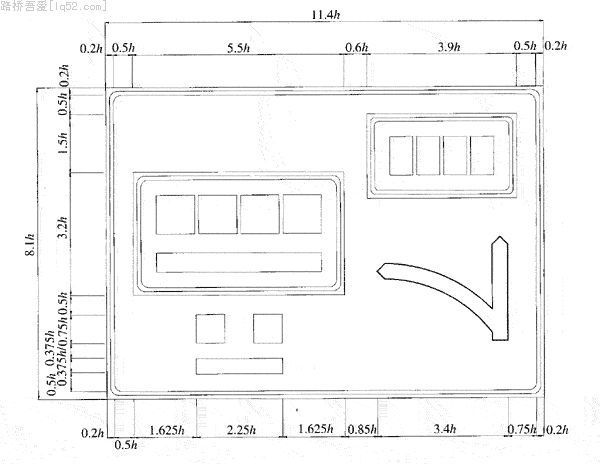
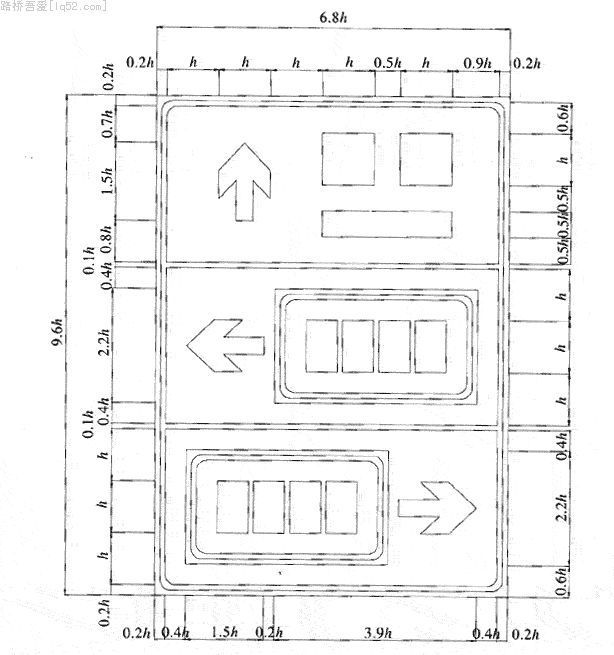
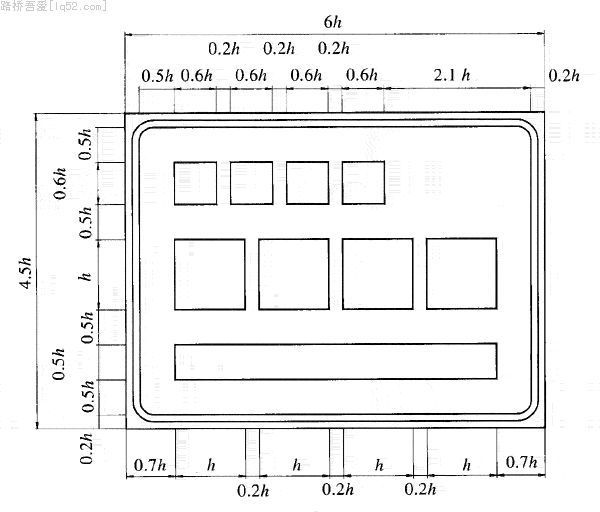
ЁЁЁЁЭМH14ЃЈТЗ13aЃЉ
ЁЁЁЁ

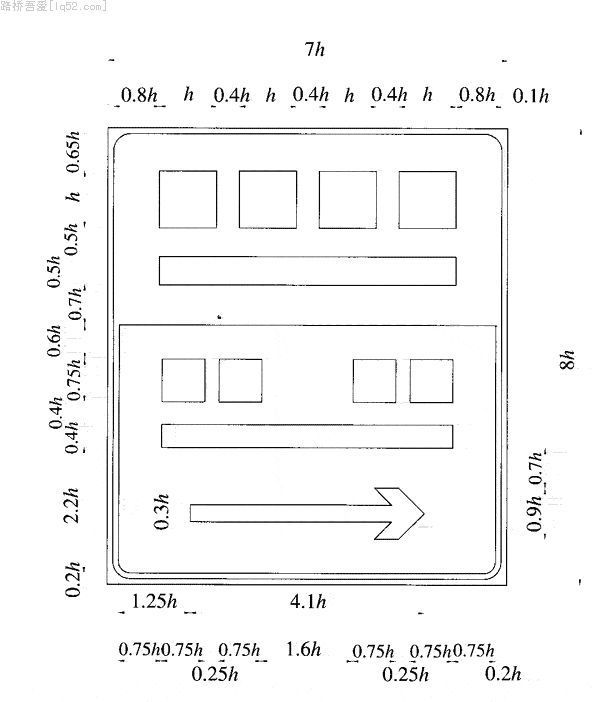
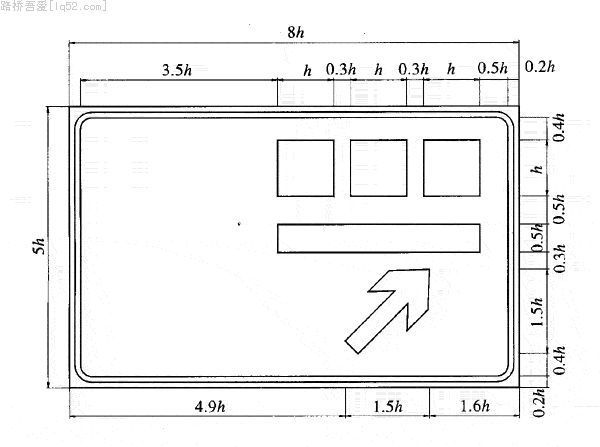
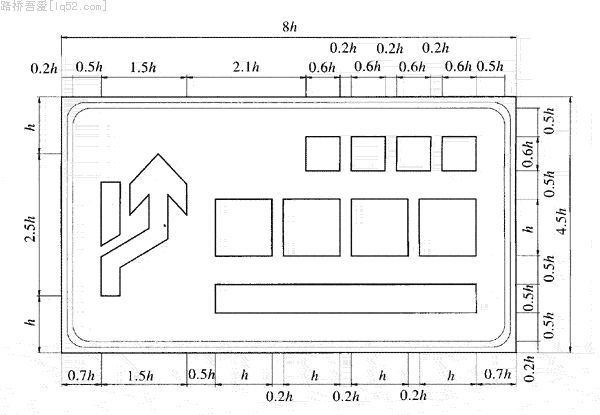
ЁЁЁЁЭМH15ЃЈТЗ14ЃЉ
ЁЁЁЁ
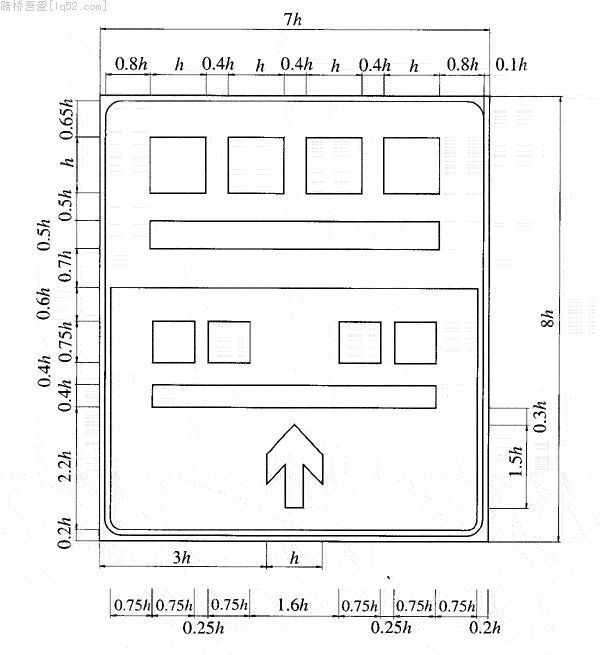
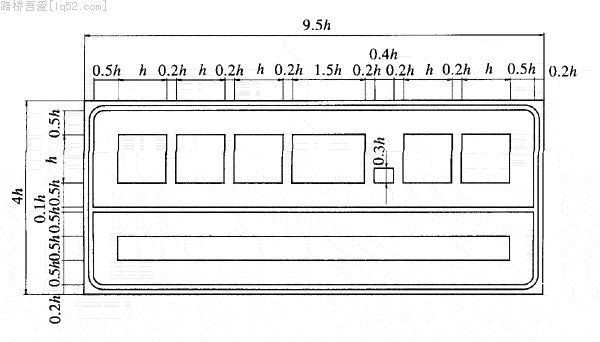
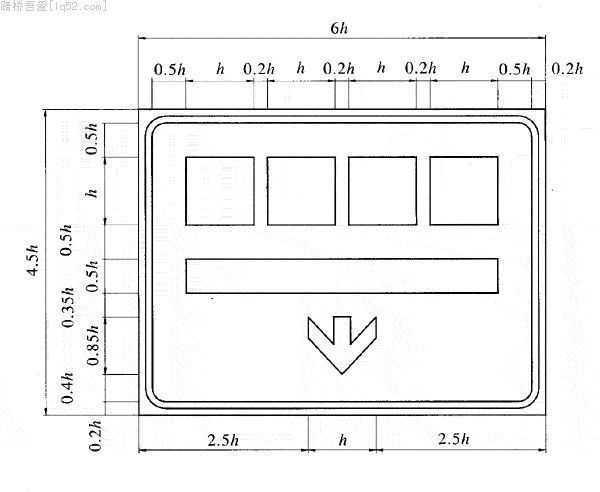
ЁЁЁЁЭМH16ЃЈТЗ15ЃЉ
ЁЁЁЁ
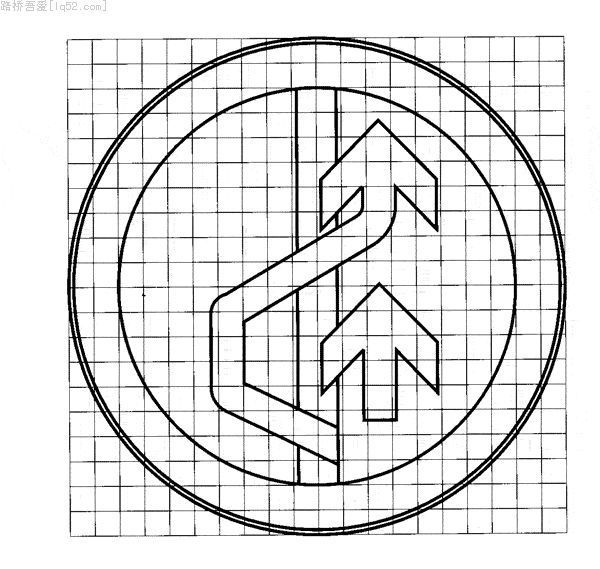
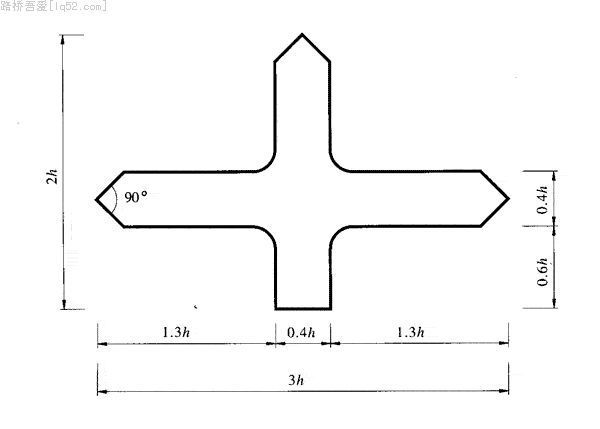
ЁЁЁЁЭМH17ЃЈТЗ16ЃЉ
ЁЁЁЁ
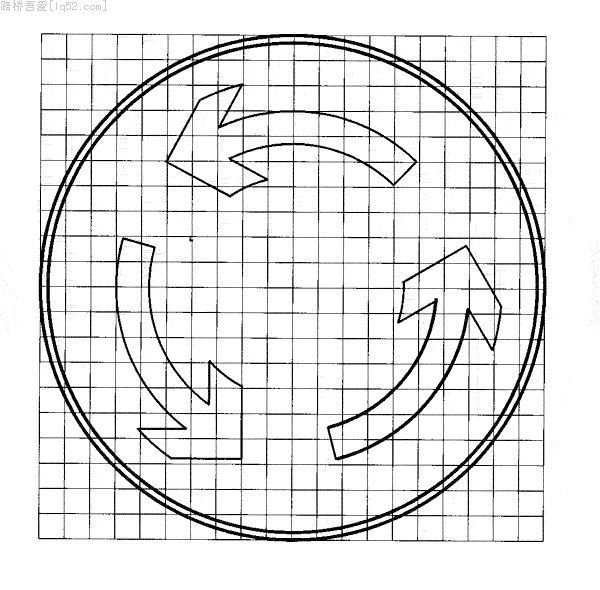
ЁЁЁЁЭМH18ЃЈТЗ18ЃЉ
ЁЁЁЁ

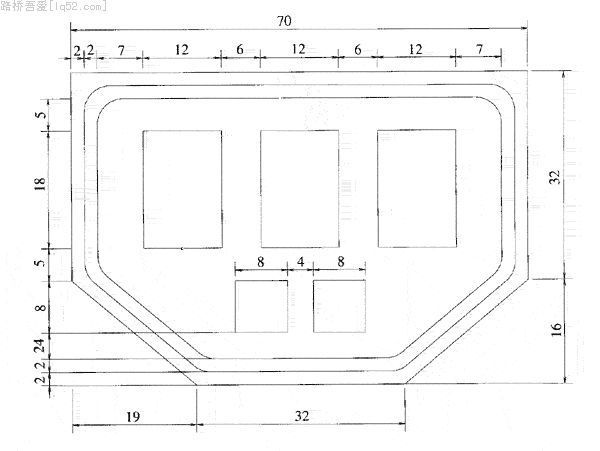
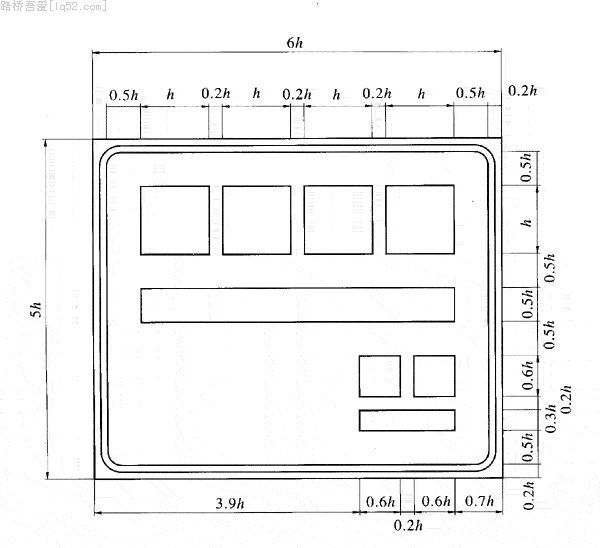
ЁЁЁЁЭМH19ЃЈТЗ46ЃЉh=70cm
ЁЁЁЁ

ЁЁЁЁЭМH20ЃЈТЗ25ЃЉh=20cm
ЁЁЁЁ
ЁЁЁЁЭМH21ЃЈТЗ26ЃЉ h=20cmЃЌh=30cm
ЁЁЁЁ
ЁЁЁЁЭМH22ЃЈТЗ26ЃЉh=20cmЃЌh=30cm
ЁЁЁЁ
ЁЁЁЁЭМH23ЃЈТЗ27ЃЉh=20cm
ЁЁЁЁ
ЁЁЁЁЭМH24ЃЈТЗ27ЃЉh=20cm
ЁЁЁЁ
ЁЁЁЁЭМH25ЃЈТЗ54ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH26ЃЈТЗ29ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH27ЃЈТЗ30ЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH28ЃЈТЗ31ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH29ЃЈТЗ32ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH30ЃЈТЗ33ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH31ЃЈТЗ34ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH32ЃЈТЗ35ЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH33ЃЈТЗ35dЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH34ЃЈТЗ36aЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH35ЃЈТЗ36bЁЂcЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH36ЃЈТЗ37bЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH37ЃЈТЗ39aЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH38ЃЈТЗ39bЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH39ЃЈТУ1ЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH40ЃЈТЗ41cЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH41ЃЈТЗ47aЃЌbЃЉ
ЁЁЁЁ

ЁЁЁЁЭМH42ЃЈТЗ47cЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH43ЃЈТЗ48bЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH44ЃЈТЗ51aЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH45ЃЈТЗ51bЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH46ЃЈТЗ51cЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH47ЃЈТЗ51dЃЉ
ЁЁЁЁ
ЁЁЁЁЭМH48
ЁЁЁЁ

ЁЁЁЁЭМH49
ЁЁЁЁ
ЁЁЁЁЭМH50
ЁЁЁЁ
ЁЁЁЁЭМH51
ЁЁЁЁ
<< ЩЯвЛвГ [11] [12] ЯТвЛвГ
|